Plutselig fikk jeg nesten en hel søndag til disposisjon, og det i samme åndedrag som det kom ny software til Lowrance StructureScan 3D. Det måtte bli en dag med vertikalfiske det. Bare å få Starwelden ut av garasjen og komme seg avgårde.
 |
| Det obligatoriske fylle-tanken-bildet |
Dagens mål var en av de større sjøene på Østlandet med både gjørs og gjedde. Jeg har ikke fått testet Starwelden min skikkelig til oppsøkende vertikalfiske enda, altså vertikalfiske der man aktivt leter opp en fisk, holder båten over den fisken og fisker på den. Jeg er veldig spent på hvordan det blir å fiske slik fra den, all den tid den tross alt veier endel (som gir sig) og har en ganske stor motor på. Finmanøvrering og hyppige girskift ER enklere i en lett liten båt med liten påhenger med rorkult. Men målet her er en båt som skal egne seg til det meste, uten at den kanskje er helt perfekt til noe. Omtrent som eieren vil jeg påstå....
Jeg var på vannet godt etter et eventuelt mårrabett, men vel utpå var det bare å innse at dette neppe ble en kanondag rent fiskemessig uansett tidspunkt. Høyt og ganske møkkete vann, og store mengder pollen. Pollen er helt drepen for skannende ekkolodd, både SideScan og DownScan påvirkes av det og blir rene grøten på skjermen. De tre bildene under her sier egentlig det meste i så måte.
 |
| Mye grøt på SideScan, men også mye i overflaten på 2D. |
 |
| Årsaken - pollen. |
 |
| Ekstrem overflatestøy på 2D og nesten ubrukelig SideScan. |
Jeg fant fort ut at jeg måtte finne områder med mindre pollen i vannet om jeg skulle ha mulighet til å finne en fisk å slippe jiggen min på. Taktikken her er tilsynelatende enkel, kjøre rundt i 3-4 knop og følge med på både 2D og SideScan for å se etter større enkeltfisk. Ser jeg en fisk som ser spennende ut, markerer jeg den i ekkolodd-/SideScanbildet som waypoint, snur båten (eller bakker, kommer litt an på) og forsøker å finne igjen fisken. Så gjelder det å holde båten rolig over fisken mens jiggen slippes ned og stoppes en meter eller to over fisken før man begynner en (forhåpentligvis) forførende teknikk med småjigging og vibrasjoner. Går alt som ønsket stiger ekkoet mot jiggen din og tar. Som regel finner man enten ikke igjen fisken i det hele tatt, eller så stikker den av så fort du har sluppet jiggen. Sjelden er teori og praksis så forskjellig som under vertikalfiske, men det er en del av utfordringen. Denne fiskeformen er både morsom og svært frustrerende på en gang.
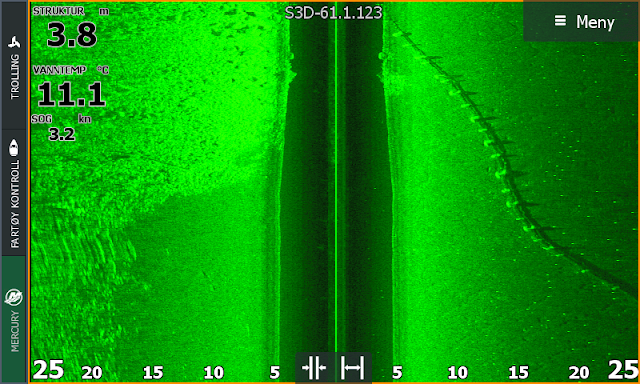
I løpet av de gode seks timene jeg var utpå fant jeg to fisk jeg anså som spennende nok til å fiske på. Den ene fant jeg aldri igjen, den andre stakk så fort jiggen min stoppet over hodet på den. Derimot er det ofte mye annet spennende å se på SideScan. Her en rørledning.
Etter å ha fulgt med på diverse forum og nettsider ser jeg at jeg nok var for tidlig ute for gjørs, de var rett og slett ikke ferdige med vårens gyting enda. Siden jeg uansett ikke fant særlig med fisk å fiske på ble jeg sittende å fikle litt med Mercury Vesseleview Mobile appen og drivstoffunksjonene der.
 |
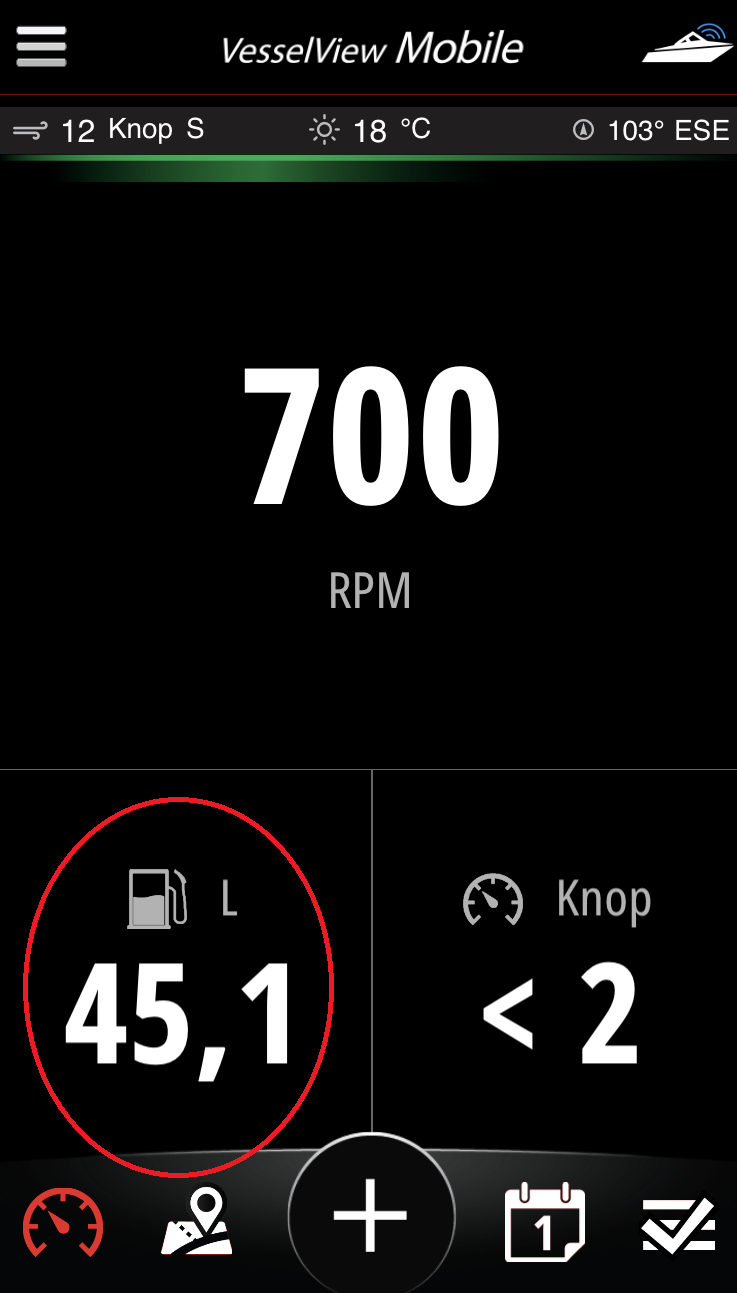
| Startbildet i appen, før jeg trykker på drivstoff. |
Skjermbildet over er startbildet i appen, appen får igjen motordata fra min Mercury 115 Pro XS via blåtann. Klikker jeg på den virtuelle drivstofftanken nederst i venstre hjørne får jeg mer informasjon om drivstoff:
 |
| Inne på drivstoff. |
"Tankmåleren" i appen er virtuell, med andre ord en beregning av gjenværende drivstoff basert på sensorer i motoren som måler forbruk fortløpende (fuel flow sensor). Hver gang jeg fyller tanken legger jeg inn hva jeg har fylt. (Tanken i Starwelden er på 50 liter.) Den virtuelle tankmåleren fungerer veldig bra så lenge jeg husker å legge inn hva jeg har fylt, den er vel så presis som flottørmåleren. Tanken i Starwelden er bred og lav, og det gjør at flottøren er veldig utsatt for bevgelse i båten, litt gass så viser den mye mindre drivstoff enn hva som faktisk er på tanken.
Jeg kan også klikke på hver enkelt databoks i bildet over og drille enda mer ned i forbruket mitt. Jeg er i det hele tatt litt imponert over hva Mercury har fått til med Vesselview Mobile. Settet du trenger koster drøye 3000,- og passer på alle Mercury som er Smart Craft-kompatible. Det betyr i praksis alle Mercury av nogenlunde nyere dato fra 40HK og oppover.
I tillegg til den virtuelle tankmålingen i appen har jeg en fysisk tankmåler også, i form av en flottør, Denne er koblet inn i Mercury-systemet som igjen gjør det om til NMEA2000-data som kan vises på båtens skjermer i tillegg til Mercurys egne instrumenter.
 |
| Simrad 7 GO xse via Link-app for skjermbilde. |
På vei hjem tok jeg også en holeshot-test med nevnte app, noe som resulterte i ny båtrekord.
 |
| Skremmende fort egentlig. |
3,7 sekunder fra 0 til 20 knop er veldig raskt. Det er så raskt at trimmfunksjonen på motoren ikke rekker å holde følge, så båten overplaner før motoren rekker å tilte langt nok ut. (Innen den rekker det har jeg passert 30 knop.)
 |
| God utvikling |
Jeg kommer garantert tilbake til denne sjøen flere ganger i år. Men før den tid skal jeg hente og montere et Z-Bait ekkoloddgiverstativ så jeg slipper å jigge bakover. Per nå har jeg bare ekkoloddgivere bak på båten, og det er svært lite hensiktsmessig ved oppsøkende vertikalfiske.
Og hvordan gikk det med ny software på StructureScan 3D?
Med så mye pollen kan jeg ikke konkludere med noe som helst. Styringen av kontrast i manuell modus har blitt mye bedre, men hvordan den viser fisk må jeg nesten komme tilbake til for per nå er det vanskelig å se fisk i det hele tatt.
















Kommentarer
Legg inn en kommentar