
This article can be found in Norwegian HERE.















I'm on leave with my youngest, and have been lucky enough to have my boat docked in the nearby harbor of Blommenholm. So when I got a tip of a wreck that was not marked in the official draft for the Oslofjord, my son and I went straight out to see if we could find it.
I could not find any information on the wreck from Google, but Thomas reached out for me. According to his source this is a shrimptrawler that sunk some 20-30 years ago. The winch on her front deck as sunken through the deck, leaving a gaping hole, a hole I believe we can see on some of the screenshots below.
She sits with her bow at a depth of 14 meters, while her stern rests at 15 meters. The wreck stretches from N059.52.793, E010.32.327 to N059.52.788, E010.32.339. It is easily accessible just outside Kalvøyakalven in Sandvika, and should make for an interesting dive.
The equipment I'm using here are Lowrance HDS Gen 2 multifunction displays, with an Airmar P66 transducer for the 2D-sonar and Lowrance StructureScan 3D module and ducer for the SideScan and DownScan. While StructureScan 3D is not officially supported by my HDS Gen 2s, you can see that it works very well. The 3D-image can only be viewed with HDS Gen 3 og Simrad NSS, but the advantages of better SideScan then with LSS-1/LSS-2 are the same in HDS Gen 2.
I'll start the show with a few screenshots of the wreck from my HDS 8 Gen 2.




I then turn 90 degrees from my first couple of passes over the wreck, to look at it from another angle. Note what looks like disturbance on these shots. They where taken a couple of hours after my first attempt, and in the meantime a large school of what I think was small European Sprat had taken up the site as their new home. I could see them on the surface as well. It is kind of a problem of luxury when to much fish makes it harder to see with your sonar...


Here are a few shots of DownScan from my HDS 5 Gen 2. (On a sidenote, there is no difference in DownScan between LSS-2 and StructureScan 3D, only the SideScan is improved).



I'll throw in a screenshot from the HDS 5 Gen 2 using 2D-sonar as well. On the left side of the screen you see 200 kHz with its rather narrow coneangle of 11 degrees (measured at -3db), while the right side of the screen is 50 kHz with a whopping 45 degrees coneangle. (You can read the full spec of the P66 from Airmar HERE.) This screenshot clearly shows you how a narrow versus wide coneangle affects how your sonar reads and draws the bottom line. With 200 kHz the wreck clearly rizes from the bottom, while the wide coneangle of the 50 kHz makes it disapear in the bottom line. On 50 kHz we can only see a faint hint of the wreck since the bottom line thickens slightly where the wreck is, due to the wrecks harder return of the acoustic signal then the surrounding (softer) bottom.

We then move from my boat and back home. Since I recorded my sonarlog to a memorycard, using the SL2-format of sonarlog, I can view it on my laptop. I'm using Reefmaster Pro software with the add-on SideScan Mosaic module for this. There are several good reasons to look harder at the sonarlog when back home. One is that you then can have full attention on it, while in the boat there are always other things demanding your attention. Another reason is that even a cheap laptop has far better resolution on its screen then even the best multifunctiondisplay we find in a boat.
Two screenshots straight from Reefmaster:


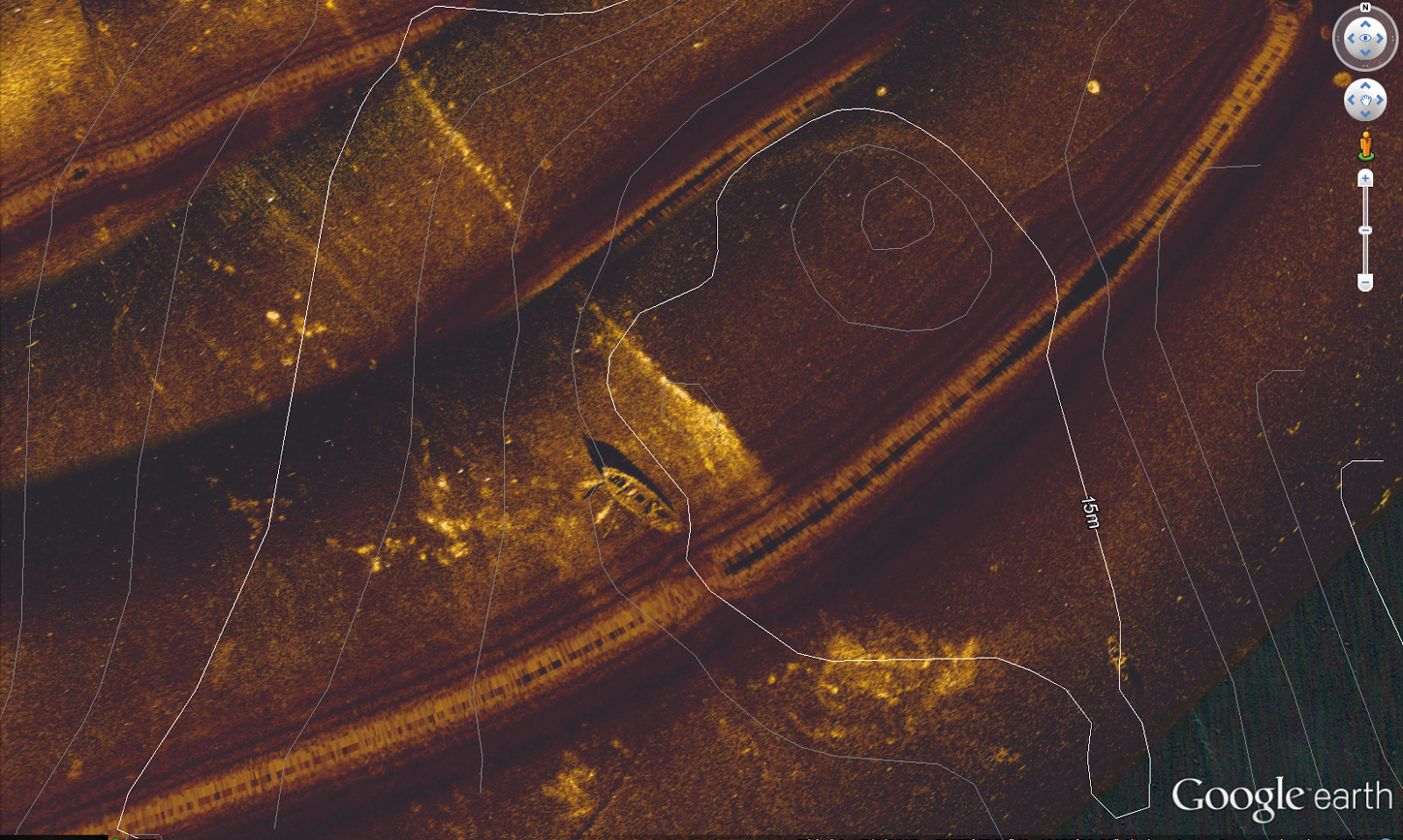
I then use Reefmaster to convert the SL2-sonarlog into KML, in order to view it in Google Earth. (GE is a free program that you can download HERE.)


Using Reefmaster I can also use layers on top of the image, here with depth-contours.
If this article made you want to go straight out and hunt for wrecks, then my mission with this article has been a success. Keep these pointers in mind and you will have a good start:
- Do not use extremely long range on your SideScan. StructureScan 3D does quite well with long ranges, but if you are using LSS-1/ LSS-2/ TotalScan then you should use not more then 30-40 meters range to each side in order to see enough details to spot a wreck.
- Use 455 kHz, not 800 kHz. 455 "punches" better through the water with less signal-loss and has a more open cone/ strobe so you will se more with it.
- Take time to adjust your boatspeed for the best images. On the screenshots above you can see that my boat did 3-4 nots, but you should really test different speeds as this will vary with the equipment used. Less then 2 nots is no point, a good starting-point is 3 nots.
- If you intend to use your sonarlog in software like Reefmaster, then use the SL2-format. The newer SL3-format can not be used in the same way at this time. (Hopefully Navico will release the encryption on SL3 soon, but stick to SL2 for now.)
- If/ when you find something interesting, then do not run your boat straight over it. Passing by slightly to the sides will give better images on both SideScan AND DownScan.
Detta var skikkelig kult! Du er jaggu en teknisk gluping:)
SvarSlettTakk. :) Hvis det passer seg sånn skal jeg se om jeg finner noen flere vrak også. Det skal forresten være et vrak av en dampbåt et sted i Tyrifjorden, du vet ikke tilfeldigvis hvor det er?
SlettTror jeg har hørt at den ligger et sted mellom Dampbåtbrygga og Vikersund bro, men det kan godt hende jeg har drømt også:).
SvarSlettSkal høre litt med et par som kanskje har greie på det.
Jo den vet jeg om, men det skal være en til. Det var visstnok opprinnelig to slike slepebåter på Tyri.
SvarSlettGreat post! Thank you!
SvarSlettThank you for taking the time to write that. :)
Slett